To create the base coil, i used 14 gauge single strand wire. I wrapped the wire 400 times around two framing brackets that i bolted together. After wrapping i connected both sides of the wire to the battery and test to see if it was a magnet and it worked.
Creating the Armature
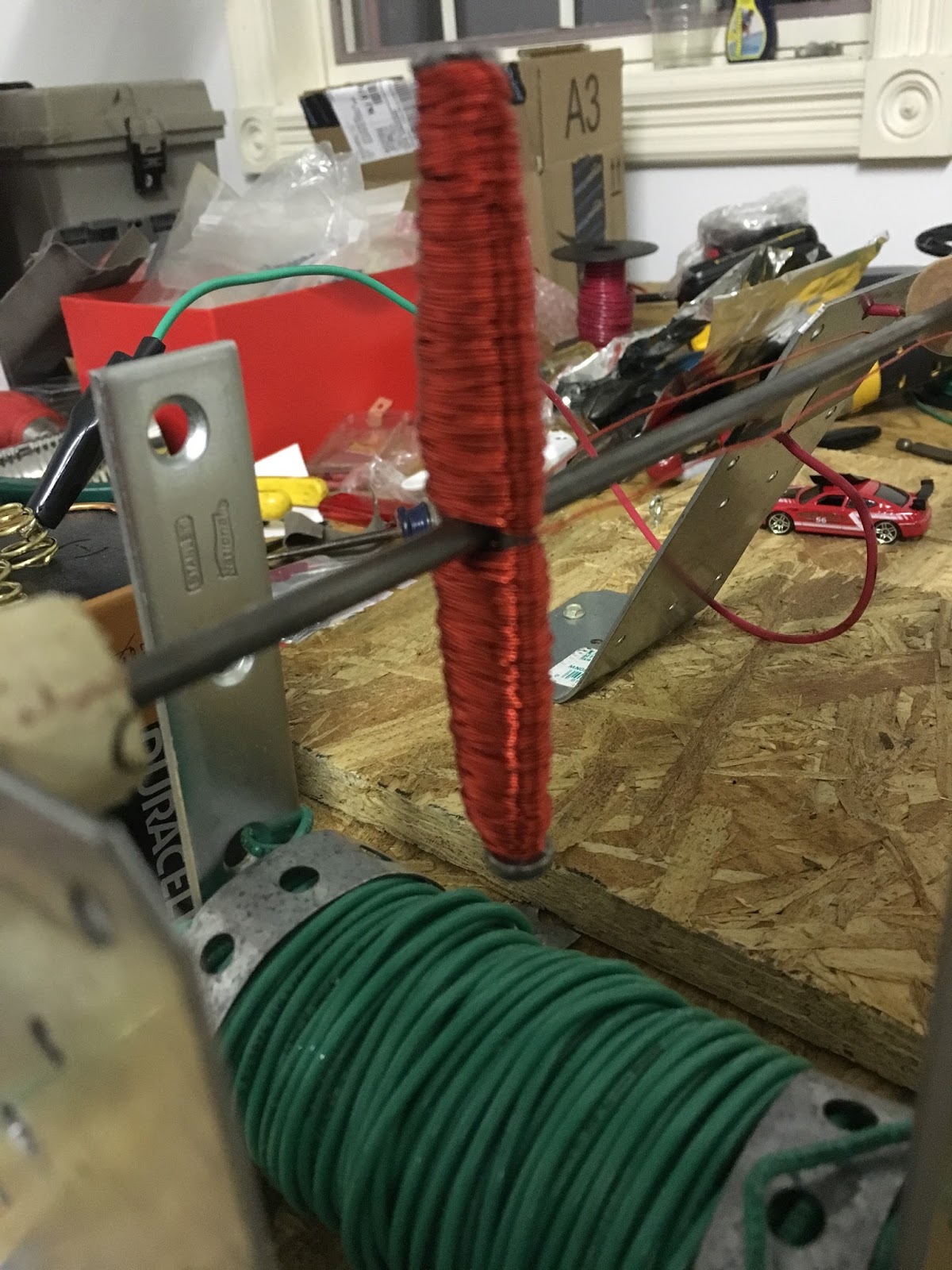
I used a welding rod, 2 nails, and 24 gauge magnet wire to create my armature. I taped the 2 nails together and wrapped them with the magnet wire to create a magnet. The wire from the nails runs down the welding rod to the commutator.
The Commutator and Brushes
I used a piece of cork along with two pieces of copper to conduct the electricity to the magnet wire. I used stranded wire to create my brushes, so that there were multiple connections to the copper on the cork.
Issue I Faced
The major issue that i faced while creating the electric motor was the commutator. i used heavy duty tin foil to conduct the electricity to the magnet wire and found that it did not work well. I then decided to us pieced of copper, which conducted the electricity to the magnet wire much better and allowed it to spin.
Electric motors have many parts that were created over time and put together. The battery was created by Alessandro Volta in 1800, The magnetic field and electric current was created by Hans Christian Oersted in 1820, and the electromagnet created by William Sturgeon in 1825 all laid the foundation for the electric motor. The first real electric motor was created in 1834 by Thomas Davenport. The early motors created spinning discs or levers that rocked back and forth. These early motors had no use for humankind, but paved the way for future motors.
Necessary Parts Of An Electric Motor
-AC or DC Power
- Base Coil to create a magnetic field
-Armature
-Commutator
-Copper Wire
-wire brushes
The armature is one of the most difficult parts of the motor to build. It is a long rod that has the commutator and an electromagnet that reacts with the magnet from the base coil. With the alternating positive and negative charges that run through the wire brushes and into the commutator it allows the armature to spin while reacting with the base coil magnet.
An object that has balanced forces on all sides is said to be in a state of equilibrium. This does not mean that all forces have to be equal on opposite sides. In the diagram below you can see how the forces up and down are not the same to the forces going left to right, but are still in a state of equilibrium
Objects that are in a state of equilibrium must have an acceleration of 0 m/s^2, but this does not mean that an object in equilibrium is always static. An object can be in equilibrium if it is moving with the same speed and direction.
Static Equilibrium
An object at rest and in the state of equilibrium is said to be in static equilibrium. In the image below, the weight being held on the string, is in static equilibrium because it is at rest and all the forces are balanced.
Equilibrium In Chemistry
Chemical Equilibrium is the when the reactants yield a product that has no net change in the reaction. Chemical Equilibrium is also known as a steady state reaction, where the reaction is happening but it has reached a balanced condition. Dynamic Equilibrium is when the products and reactants stay constant, while the reaction continues to happen.
Equilibrium in Everyday Life
The Forces of the two children balance because of the different radii between the smaller boy and larger girl
The stones are in static equilibrium because they are still and all the forces applied on the stones equal out.
The Carbon Cycle is an example of equilibrium because the carbon is moving at a constant rate from step to step throughout the cycle.
A car at a stop sign is in the state of Static Equilibrium
Programming is the use of codes to create different programs or tasks that the computer can do. There are many different types of coding languages to use while programming. For example Java, C++, and Python. Programming is usually a procedure that takes in input data, processes it and turns it in to output data.
Python Programming
Many major companies like Disney, IBM and NASA use Python to code. Python has been used to create many different video games and other general purpose tasks. Python is a coding language that allows the user to do the same tasks as Java and C++, but in a fewer amount of lines.
Java Programming
The Java code first appeared in 1995. The code is is much simpler than C++, and allows the programs to be used on one computer or over a server, which allows many people to access the program. The Java code is specially designed for Object-Oriented Programming. Object-Oriented Programming is a way to manipulate objects and data rather than the actions.
C++ Programming
C++ programming is used for packaged software most of the time. This includes games, Office applications, graphic and video editors, and operating systems. Most software that is not used online was most likely created by the C++ coding language.
Different Fields That Programming Is Used In
Programming is a wonderful asset to have and will make you stand out while looking for jobs. Almost all companies use some type of program, so knowing how to code will make you look like a prime candidate. Programming is used in Biology, Physics, Finance, Math, Robotics, and Graphic Design.
History of Programming
The first programmer was Ada Lovelace. In 1842-1843 she worked on translating an article about Charles Babbage's analytic engine. They found an algorithm in her notes, which makes her the first programmer. Ada Lovelace also predicted that computers would be able to play music and chess in the future. There is a programming language named after her that the US Department of Defense uses.
In 1889, a man named Herman Hollerith created a machine that could read data. He invented the tabulator and keypunch machines that were the basis for information processing. He created a company called The Tabulating Machine Company in 1892, which is now IBM. The first electronic and digital computer was created by Herman Hollerith. It was called the Atanasoff-Berry Computer and was used to solve linear equations.
The first electronic digital programmable computers were the Colossus computers which were developed during World War II, and were created to decipher German messages.
Fortran was the first advanced level of programming language used. It was created by John Backus, who worked for IBM. It was created in 1954 and released to the public in 1957.
The first computer game was called Spacewar. It took nearly 200 hours for Steve Russell to create the game, which allows two players to fire missiles at each other. He worked with Nolan Bushnell at Stanford and created the first coin operated arcade game.
Fred Cohen designed the first virus for computers. He used a floppy disc that could be inserted into the computer, copy itself and then spread to other computers. It was only designed to see if it would work. There was no harm that the virus caused.
A robot is machine capable of carrying out a complex series of actions automatically. The growth of robots expanded immensely in the 20th century. In fact, the history of robots date back to greek times, when two texts were produced called the Pneumatica and Automata. In these texts included the ideas of many different "wonder machines" capable of automated movement. Many people trace robotics back to Ancient Greece and Rome. The simple machines were used as tools, toys, and were part of different religious ceremonies. The Arab polymath Al-Jazari(1136-1206) left texts describing and illustrating his various mechanical devices, including a large elephant clock that moved and sounded at the hour, a musical robot band and waitress automaton that served drinks.
Examples of some robots from Greece and Rome:
Victorian Times
The Industrial Revolution and the increased focus on mathematics, engineering and science in England in the Victorian age added to the momentum towards actual robotics. Charles Babbage (1791-1871) worked to develop the foundations of computer science in the early-to-mid nineteenth century, his most successful projects being the difference engine and the analytical engine. Although never completed due to lack of funds, these two machines laid out the basics for mechanical calculations. Others such as Ada Lovelace recognized the future possibility of computers creating images or playing music. During this period was the development of steam-powered machines and engines that helped to make manufacturing much more efficient and quick. Factories began to employ machines to either increase work loads or precision in the production of many products.
Some Examples of Victorian Robotics
Boilerplate was unveiled in 1893 by Professor Archibald Campion. Built as a prototype soldier for use in resolving the conflicts of nations.
The Steam Man was created in 1868 by famed inventor John Brainerd.
Robotics from 20th century until today
In 1920, Karel Capek published his play R.U.R. (Rossum’s Universal Robots), which introduced the word “robot.” It was taken from an old Slavic word that meant something akin to “monotonous or forced labor.” However, it was thirty years before the first industrial robot went to work. In the 1950s, George Devol designed the Unimate, a robotic arm device that transported die castings in a General Motors plant in New Jersey, which started work in 1961.Robotics became a burgeoning science and more money was invested. Robots spread to Japan, South Korea and many parts of Europe over the last half century, to the extent that projections for the 2011 population of industrial robots are around 1.2 million. Additionally, robots have found a place in other spheres, as toys and entertainment, military weapons, search and rescue assistants, and many other jobs. Essentially, as programming and technology improve, robots find their way into many jobs that in the past have been too dangerous, dull or impossible for humans to achieve. Indeed, robots are being launched into space to complete the next stages of extraterrestrial and extrasolar research
Military Robotics
The history of military robots can be traced back to the times of World War II. During the time of World War II and the Cold War, these robots were in the form of German Goliath tracked and Soviet teletanks. It is also believed that military robots history can be dated back to the 19th century, precisely in 1898. The history begins with the invention of radio controlled boat intended for military use by Nicola Tesla. He offered his invention to US navy in order to produce radio controlled torpedoes but the navy refused his offer. Later, he offered his invention to the United Kingdom.
Soviet Teletank
At present the most commonly used military robot is the unmanned aerial vehicle IAI Pioneer and RQ-1 Predator. These robots can be armed with Air-to-ground missiles. We have also seen some propitious research in the field of artillery with an experimental weapons system named ‘Dragon Fire II’. This weapon automates the loading and ballistics calculations required for accurate predicted fire, providing a 12 second response time to artillery support requests. There have been some developments towards developing autonomous fighter jets and bombers.
Robotics in the Health Field
The first robotic system applied in a surgical procedure was the PUMA 560, used to orient a needle for a brain biopsy under computerized tomography guidance. However, its use was discontinued because of safety issues. Following the same tendency, in 1992, International Business Machines (IBM) and associates developed a prototype for orthopaedic surgery. The ROBODOC was used to assist surgeons in milling out a hole in the femur for total hip replacements. A new era was beginning, that would allow the surgeon to operate at a distance from the operating room, was being intensively researched simultaneously at the Stanford Research Institute, Department of Defence, and the National Aeronautics and Space Administration (NASA).The initial purpose was to create a prototype to suit the needs of the military, and the robotic arms were designed to be mounted on an armoured vehicle to provide immediate operative care in the battlefield.
Robotics in Space
When it comes to exploring the hostile environment of space, robots have done a lot (if not most) of the exploring. The only other planet besides Earth that humans have set foot on is the Moon. Robotic explorers, however, have set down on the Moon, Mars, Venus, Titan and Jupiter, as well as a few comets and asteroids. Robotic missions can travel further and faster, and can return more scientific data than missions that include humans. There is much debate on whether the future of space exploration should rely solely on robots, or whether humans should have a role.
INDUSTRIAL ROBOTICS
Robots are an indispensable part of today's large manufacturing industries. These intelligent machines have taken over many of the tasks requiring high precision, speed and endurance. They are becoming increasingly smarter, more flexible and more autonomous, with the capability to make decisions and work independently of humans. From 1980, industrial robots began to be made in large numbers, with a new robot being introduced in the market at the rate of one a month. These robots are microprocessor-controlled and are smarter and have a higher degree of operational freedom.Industrial robots are increasingly becoming more "intelligent" and versatile. In the future, they are expected to be capable of working without human intervention and take over most of the manufacturing processes
The technological singularity is a hypothetical event related to the advent of genuine artificial general intelligence. It was an idea that came from Ray Kurzweil, a world leading inventor and futurist. Looking at the graph below, we can see the linear progression of humans and the exponential growth technology or machines
RAY KURZWEIL
Ray Kurzweil has a 30 year track record of correctly predicting the future. He was the principal inventor of the of the first CCD flat-bed scanner, the first omni-font optical character recognition, the first print-to-speech reading machine for the blind, the first text-to-speech synthesizer, the first music synthesizer capable of recreating the grand piano and other orchestral instruments, and the first commercially marketed large-vocabulary speech recognition. Ray Kurzweil received the 2015 Technical Grammy Award for his works in the field of music technology. He has written 5 national best selling books, including New York Times best seller The Singularity is Near.
VERNOR VINGE
Vernor Vinge, like Ray Kurzweil, believes that Singularity will occur within a short time frame. Vernor Vinge was a San Diego State Professor who is also an author of science-fiction books. Vernor Vinge believes that the path to follow to get to singularity is not through artificial intelligence but through intelligence amplification. Intelligence amplification is the effective use of information technology in augmenting human intelligence. His view is that singularity will occur, but humans will go along in that process. He believes that humans will be parts of the robots and the robots are just there to withhold information for them.
Predictions on when Technological Singularity will happen?
Ray Kurzweil made the prediction that in 2045, technology with take control of all humans. On the other hand many other people believe that technological singularity is not near. For example, Paul Allen, a Microsoft co-founder, believes that Technological Singularity will not occur for much more time than the predicted time of 2045. Paul Allen believes that the progression that is needed for singularity to occur by 2045 is almost impossible. He believes that in the fields of neurology, cancer research, and nuclear fusion, that we know to little now for the robots or machines to be able to take control by 2045. He also believes that with the technology that we will obtain between now and 2045, we will not be able to replicate the brain to work the same in the robots or machines.
Artificial Intelligence (AI)
What is Artificial Intelligence?
- the theory and development of computer systems able to perform tasks that normally require human intelligence, such as visual perception, speech recognition, decision-making, and translation between languages.
Elon Musk, CEO of SpaceX and Tesla Motors, believes that exponential growth of Artificial Intelligence is going to be threatening to the human race.
Many other people including Stephen Hawking and Bill Gates fear the growth in Artificial Intelligence as well.
Facebook has also put a lot of research into AI to help people who are blind see posts to facebook.
Here is a video showing how
The growth of Artificial Intelligence is starting to affect peoples everyday lives.
Artificial Intelligence in Everyday Life
Many different Artificial Intelligence aspects benefit peoples lives and stop them from doing basic and annoying tasks.
Roomba Vacuum Cleaner- A vacuum cleaner that vacuums the floor automatically and knows where to move by sensors
Siri
Cleverbot- Cleverbot is a chatterbox that is modeled after human behavior and is able to withhold human conversation.
Reverse Camera for Cars- The camera and sensors notify the driver if the car is close to hitting anything.
IBM Watson- Waston is an artificially intelligent application developed by IBM and used in different fields such as finance, engagement and healthcare to help users make their decisions. Waston is a Siri-like application in the idea of understanding the natural human language and come up with an answer; However, Waston store more than 200 million pages of data including the whole text of Wikipedia. In the healthcare field for example, Waston will suggests different types of treatment to doctors based on different criteria like medical history and hereditary history.
DARWIN THE ROBOT
Darwin is one of the first robots that was able to teach itself how to walk. Darwin was Developed by Pieter abbeel and his team at UC Berkeley's Robot Learning Lab, the neural network that allows Darwin to learn is not programmed to perform any specific functions, like walking or climbing stairs. The team is using what's called "reinforcement learning" to try and make robots adapt to situations as a human child would.
The graph below shows the major technological advances that have occurred from the 1900 to today. As we can see the graph grows exponentially, which means it growing much more that the linear graph of humans. Once humans are able to make a robot that can successfully live in everyday life, then the human race will almost become pointless. All the jobs will be filled by robots, and eventually they will realize that the use of humans is not necessary to their lives. They will look back on humans as their ancestors. Robots will fill the earth, because at some point they will be able to do anything a human can. It is impressing how technology has grown over the last 100-150 years. Hearing stories from my grandparents about how there wasn't any cellphones or laptops back when they were children. We can already see the uses of technology in our everyday life. Factories are becoming fully automated now, which means their are less jobs for people. We can already see the increased use of technology, as children and adults stay buried in their phones for hours at a time. As long as there is this interest in technology from people, the more likely technological singularity is going to happen.
To start this off i just have to say that i had so many problems making my mousetrap car. I decided to make my own simple design rather than copy off of online. I wanted to see how well i could make a mousetrap car with my imagination and the little i learned in class, so i decided to make my car before researching about all the different techniques used to make a better mouse trap car. For my design I decided that the best way to make the car was using parts from a toy truck. I took the wheels and axle off of the toy truck and screw it on to the bottom of the wood that my mouse trap was attached to. I then tied string to the mouse trap and an axle that had friction tape on it. This project took me about 7 hours to complete in total. I came up with such a simple final model for the amount of time that i put into creating it.
Here is a list of problems that i came upon:
1. Choosing a design- I worked on many different designs before making my final product. I was going to use pvc pipe as an axle along with wooden wheels but thought there would be too much mass and the friction would increase. I also was going to use a brass rod as an axle with cds but couldnt find a way to make the cds stay exactly where i wanted them.
2. Wheels- First i wanted to use wood that i cut out in a circle but i thought it would have too much friction with the ground and it wouldn't go far. Second I wanted to use Cd's like most others but thought that it wouldn't get enough traction on the ground to move quickly. I came to the conclusion that i would use wheels from a toy truck because they would have enough traction and still move quickly
3. Friction between string and axle- After finishing my design, i decided to test it out. I tried once or twice but it wasn't moving. I then saw the string was getting pulled and the axle was staying still. I then used friction tape and it allowed the string to wrap around the axle and spin it when the trap was released.
Here are some pictures of one of my mouse trap cars.